世界最先端! 九州工業大学で開発された「自律型ロボット」がすごい! 2ページ目
■「できる」のと「ニーズに応える」のは違う!
――先日発表された自律型海中ロボットについては、海洋資源探査の推進に役立つと大変注目されましたが。
浦先生 今までの資源探査では、バック(船上)に人間がいてROV(遠隔操作無人探査機)を操作して海底からサンプルを取ってくる、というものだったのですが、この自律型ロボットでは全自動でコバルトリッチクラスト層の探査を行います。
ドリリングをしてマニピュレーターでサンプルを採取することを遠隔操作でやる代わりに、現場でそこに鉱物資源があるかをその場で確認します。自動でデータを取って移動するので広範囲の探査が可能です。
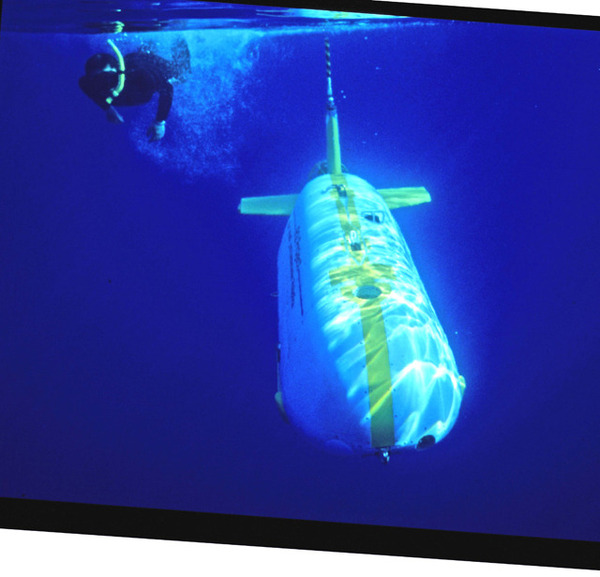
↑『r2D4』。4,000メートルの深度まで潜ることのできる航行型AUV。水平分解能のよい海底の地形図を素早く作ることができます。

↑『BOSS-A』。コバルトリッチクラストの厚さを測るために作られたAUV。拓洋第五海山を観測しました。
――すばらしい成果ですね。ロボットはあちこちの現場で求められているようですが。
浦先生 介護現場や第一次産業などロボットを使いたいという場面はたくさんありますが、どこもあまりうまくはいっていないですね。それは、そもそも「人間をリプレースしよう」という考え方が間違っているからです。
ロボット側からの視点というか、ロボットに何ができるのか、どういうことだったらロボットにやらせられるか、が考えられていないことがほとんどだからです。
――なるほど。
浦先生 例えば、今回の海中自律型ロボットですと、海底をドリルで掘ったり、サンプルを回収したりといったことは自律型ロボットは苦手です。ドリリングのためのエネルギーも要りますしね。その代わりに、センサーでコバルトリッチクラスト層のデータをその場で取得する、これならできる。また自律型ロボットなので人間の助けを借りずにずっと稼働できます。ロボットの使い方、使いどころを考えないと現場ではなかなかうまくいかないのです。
――ロボットを使いたいというニーズに応える方法が必要ということでしょうか?
浦先生 先日も議論していたのですが、「wants(ウォンツ)」と「needs(ニーズ)」は違うということです。「こうしてほしい」は「wants」で、これはロボットはたいてい実現できない。「私の代わりをしてほしい」とかは駄目なのです。
「needs」はもっと現実に即した要求です。「needs」には応えることができますが、そのやり方をロボット側からの視点で工夫しないとできません。例えば、トマトを採り入れるロボットを開発するとして……。
――サイトを拝見すると、トマトを収穫するロボットのコンテストを行っていらっしゃいますね。
浦先生 はい。でもこれがなかなか難しい(笑)。人間の代わりにトマトを収穫するロボットはできるでしょう。でも、「できる」と「ニーズに応える」のは違うんです。
1台1,000万円とかになったらそれは誰も買わないし、利用してくれない。「できました」といっても「ふーん」で終わってしまうでしょう。10万円で「使えるもの」ができるかが問われているんです。
どんな場面で、どんなことが求められ、どうすれば役に立つのかを考えないからです。人間をリプレースするものを考えるのではなく、ロボットらしい解決法こそ考えるべきことなのです。